

Hey everyone, Happy(late) Thanksgiving! Today, we’re excited announce by far the largest update to vexide yet. This release introduces support for Rust’s Standard Library, unit testing robot code, running programs without a robot, improved error reporting, and much more!
vexide is a Rust library for programming VEX robots, empowering students to write safe and efficient code for competitive robots in the Rust programming language. Learn more.
Rust Standard Library Support
vexide programs have historically required that Rust’s Standard Library (the std crate) be disabled. This forces vexide users to use the stripped down core and alloc libraries instead, which significantly limits the libraries on crates.io that projects can use. It also means we can’t use some nice features of the standard library like std::io.
#![no_std]#![no_main]no standard library :(use vexide::prelude::*;async fn main(_peripherals: Peripherals) {}We do this because the std crate depends on features provided by an operating system, and nobody had bothered to write a port of the standard library for VEXos in the Rust compiler …until now!
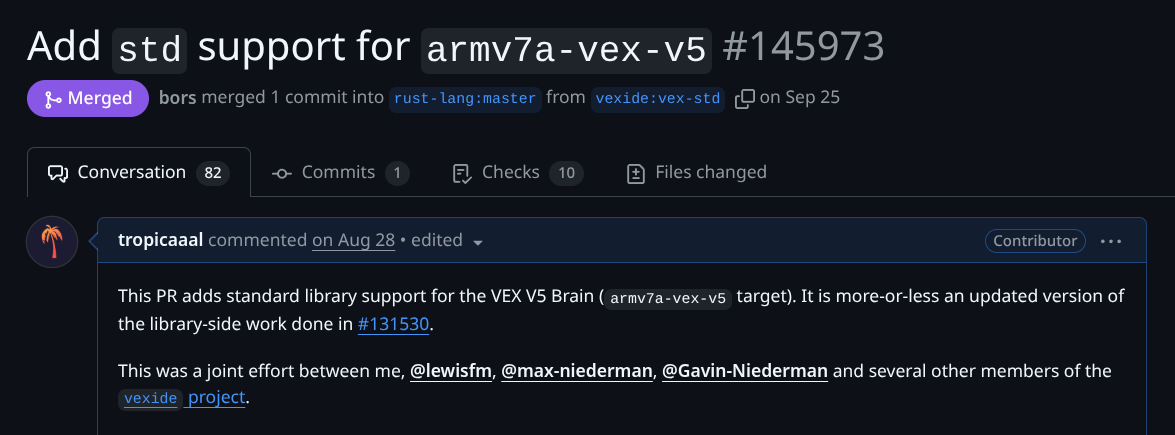
Over the last year we’ve been working on upstreaming support for VEX brains as an official compilation target and standard platform in the Rust language itself. This means that you can now use the std crate and compile to a V5 brain using the armv7a-vex-v5 target in Rust!
// This runs on a brain now.fn main() { println!("Hello, World!");}This unlocks a huge portion of the Rust ecosystem. Most libraries that require std now “just work”. You can use the std::fs API to write to the brain’s SDCard and use the real println! macro to print to the terminal. I’ve even managed to run Tokio on a V5 brain!

Please don’t try this at home.
Due to platform limitations, some parts of the standard library will return errors. Notably, std::thread::spawn will not work, filesystem access through std::fs is limited, and networking with std::net is unsupported. For a full list of what works and doesn’t work, see the target docs.
Slimming Down
In the past, vexide attempted to “fill in the gaps” left by our lack of a standard library with equivalent APIs. Now that we have the real thing, these APIs are redundant and have been removed.
We’ve also taken the chance to restructure some device-related modules to make them easier to find and less of a pain to type out. Everything in vexide::devices has been moved to the top level of the crate.
SDK Shenanigans
Before we go further, I should explain a major internal overhaul that we’ve been working towards for a while.
vexide and the standard library need some way to make calls to VEXos to control devices and handle I/O on the brain. This is traditionally done through the VEX SDK — a proprietary library shipped by VEX for VEXcode and partner developers (such as PROS). When vexide was first created, we made the decision to not use an SDK provided by VEX and instead implement our own version from scratch.

However, this posed a challenge when we were porting the standard library. Shipping proprietary code in Rust itself wasn’t an option, but forcing people to use our own SDK wasn’t ideal either and could pose challenges down the road.
Bring Your Own SDK
Instead, we picked a third option — if you use the standard library, you are expected to link your own SDK. If you use vexide, it will provide one for you. This led to us completely modularizing how vexide links to its SDK. You can now pick from three different “backends” (providers) for an SDK that vexide can run on:
vex-sdk-jumptableis the custom reimplementation of the SDK used by previous vexide versions.vex-sdk-vexcodewill download the official proprietary SDK from VEX themselves, and link your project to it. This is downloaded from VEX’s servers, and not directly distributed with vexide due to licensing restrictions.vex-sdk-proswill use the partner SDK inside of the PROS kernel as a provider for vexide’s SDK functions.
You can specify which backend to use in your Cargo.toml file by editing vexide’s feature flags:
vexide = { version = "0.8.0", features = ["full", "default-sdk"] }vexide = { version = "0.8.0", features = ["full", "vex-sdk-pros", "vex-sdk-mock"] }All of these options should provide equivalent functionality, but this setup ensures vexide remains future-proof.
Host Compilation & Unit Testing
Another advantage of modularizing the SDK in vexide is that we can now fake the underlying platform that vexide runs on. With vexide 0.8.0, you can now natively compile and run your robot’s codebase on your own computer. Here’s a screenshot of me running the clawbot example on my laptop without a robot:

To natively run your robot code, enable the vex-sdk-mock feature (enabled by default for new projects) and simply use cargo run instead of cargo v5 run.
Unit Tests
Being able to run our robot code on an actual host system means we can also support Rust’s testing features. You can now write and run unit tests against your robot logic without needing hardware on hand, integrate with CI pipelines, and catch bugs in your code earlier.
At this point in time, devices won’t do anything and will simply be disconnected at all times when using host compilation. This will change in the future, and we hope to add the ability to mock robot devices and entire subsystems in unit tests soon. We also hope to support emulating your robot’s brain screen, for testing GUIs and autonomous selectors without physical access to a brain.
use vexide::prelude::*;#{vexide::main}async fn main(peripherals: Peripherals) { println!("Hello, world!");}#[cfg(test)]mod tests { use vexide::prelude::*; use std::time::Duration; #[test]The test attribute can now be used in vexide projects. fn one_plus_one_equals_two() { assert!(1 + 1 == 2); } #[vexide::test]Use the vexide::test macro to run tests with async code. async fn async_test(_p: Peripherals) { sleep(Duration::from_millis(5)).await; println!("Hello"); assert!(4 + 4 == 8); }}Error Reporting Improvements
If you’ve ever encountered this screen, you know you’re in for a fun time:
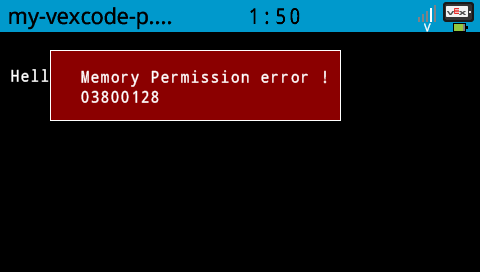
This is a data abort exception. It can happen when your program accesses memory in some way that the brain’s CPU doesn’t allow, and it often indicates that your program has undefined behavior. Think of it as the VEX equivalent of a segfault. These types of errors really suck to debug, and the error that VEXos throws up on screen often doesn’t give you all of the necessary information you need to find what caused it.
As of vexide 0.8.0, we’ll now optionally provide a more detailed report of many different CPU faults including data aborts, prefetch aborts, and undefined instruction exceptions.
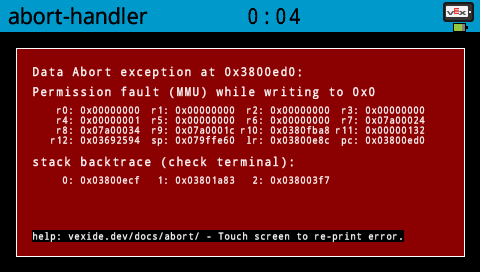
cargo v5 run --release Finished `release` profile [optimized] target(s) in 0.19s Objcopy /home/tropical/Documents/GitHub/vexide/target/armv7a-vex-v5/release/examples/basic.bin Running `slot_1.bin`go go gadget null pointer dereferenceData Abort exception at 0x3800ed0:Permission fault (MMU) while writing to 0x0registers at time of fault: r0: 0x0 r1: 0x0 r2: 0x0 r3: 0x0 r4: 0x1 r5: 0x0 r6: 0x0 r7: 0x7a00024 r8: 0x7a00034 r9: 0x7a0001cr10: 0x380fba8r11: 0x132r12: 0x3692594 sp: 0x79ffe60 lr: 0x3800e8c pc: 0x3800ed0stack backtrace: 0: 0x3800ecf 1: 0x3801a83 2: 0x38003f7help: this CPU fault indicates the misuse of unsafe code. Use a symbolizer tool to determine the location of the crash. (e.g. llvm-symbolizer -e ./target/armv7a-vex-v5/release/program_name 0x3800ed0)This new error reporting system (which is enabled by default with the abort-handler feature flag) provides more helpful information for debugging and finding the location of these types of crashes, including:
- The full cause of the CPU exception (including the type of operation that caused the fault).
- A stack backtrace leading up to the function causing the exception. The addresses in this trace can be passed to a symbolizer program like
llvm-symbolizerto find the exact line of code causing the abort. - For undefined instruction exceptions, the invalid instruction that caused the abort.
- The CPU’s registers at the time of the fault.
- The ability to print this data to the terminal and re-print it if your terminal wasn’t open when the program crashed.
As a reminder, vexide is designed to explicitly prevent these kinds of errors from happening and it should ideally be impossible to trigger these using only safe Rust code. That being said, if or when you do encounter them, we want to make the problem as easy to diagnose as possible.
Other Changes in vexide 0.8.0
Custom Encoder Support
It’s fairly common for VEXU teams to use off-the-shelf shaft encoders rather than buying sensors sold by VEX. vexide currently supports VEX’s old Optical Shaft Encoders through the AdiEncoder API, and while this is sort of compatible with custom hardware already, commonly used sensors like the AMT102-V often have much higher resolution than VEX’s optical encoders (which have a resolution of 360 ticks/rev). In the past, you’d have to multiply the output of AdiEncoder by a constant to get a usable angle reading, which was rather annoying.
In vexide 0.8.0, we now provide support for encoders with custom resolutions. AdiEncoder now takes a const-generic argument for the number of encoder ticks in a full revolution. The position reading will be automatically scaled appropriately for the encoder’s TPR.
For example, you can read from an encoder with a resolution of 8192 ticks/rev like this:
use vexide::prelude::*;const ENCODER_TPR: u32 = 8192;#[vexide::main]async fn main(peripherals: Peripherals) { let enc = AdiEncoder::<ENCODER_TPR>::new( peripherals.adi_a, peripherals.adi_b ); println!("Encoder position: {:?}", enc.position().unwrap().as_degrees());}We also provide an AdiOpticalEncoder type alias for if you’re using VEX’s optical encoder. This simply resolves to AdiEncoder<360>, and should behave identically to the previous AdiEncoder API in vexide 0.7.0 and below.
use vexide::prelude::*;#[vexide::main]async fn main(peripherals: Peripherals) { let enc = AdiOpticalEncoder::new( peripherals.adi_a, peripherals.adi_b ); println!("Encoder position: {:?}", enc.position().unwrap().as_degrees());}Task-local Storage (TLS)
vexide now supports the ability to create async task-local static data. That’s a lot of of word salad, so let’s look at what this practically means.
You can define a task-local static variable by wrapping it in the new task_local! macro. Let’s make a counter:
use std::cell::Cell;vexide::task::task_local! { static COUNT: Cell<u32> = Cell::new(1);}This looks a lot like a normal static, but when we spawn an async task, each task will get its own unique version of COUNT starting at 1. In other words, value of COUNT is local to each task accessing it.
let task = spawn(async { loop { println!("Spawned task count: {}", COUNT.get()); COUNT.set(COUNT.get() + 1); sleep(Duration::from_millis(100)).await; }});loop { println!("Main task count: {}", COUNT.get()); COUNT.set(COUNT.get() + 1); sleep(Duration::from_millis(100)).await;}Main task count: 1Spawned task count: 1Main task count: 2Spawned task count: 2Main task count: 3Spawned task count: 3Main task count: 4Spawned task count: 4Main task count: 5Spawned task count: 5Main task count: 6Spawned task count: 6
Task-local statics have a few advantages over regular global statics. Because each task gets its own isolated instance, they don’t require any form of synchronization (no need for a Mutex). They can also safely store types that wouldn’t be allowed in global statics, such as types that don’t implement Sync.
New Addressable LED API
We’ve overhauled the Addressable LED API (AdiAddrLed) for this release to allow for controlling LED strips from vexide without allocating data on the heap. Here’s an example of that in action:
use vexide::{color::Color, prelude::*};const NUM_PIXELS: usize = 18; // 18 LED diodes on our strip.#[vexide::main]async fn main(peripherals: Peripherals) { let mut strip = AdiAddrLed::<NUM_PIXELS>::new(peripherals.adi_a); _ = strip.set_all(Color::RED); // Set all lights to red.}Low-level User Program Information
We’ve added new functions for retrieving some niche information about the current user program. The new code_signature and linked_file functions in vexide::program allow you to read the currently running program’s code signature and file link address:
let code_sig = vexide::program::code_signature();let linked_file_ptr = vexide::program::linked_file();println!("Program owner: {:?}", code_sig.owner());println!("Link address: {:#x}", linked_file_ptr as usize);These functions aren’t something that you should realistically need to use or care about in most cases, but are useful to have for low-level development.
And more…?
We could go on for a while longer here covering everything else that’s been changed and fixed (there’s a lot, nearly everything has been refactored), but we have a changelog and a migration guide for that. Go read those.

cargo-v5 0.12.0 Release
Accompanying vexide 0.8.0 is a new release of cargo-v5. You’ll need to update to this new version in order to build vexide 0.8.0 projects.
cargo v5 self-updateProject Migration Tool
If you have an older vexide 0.7.0 project and want to move your project to 0.8.0, we’ve included a tool in this release to do some (but not all) of that work for you automatically. To start migrating your project 0.8.0, use the migrate subcommand.
cargo v5 migrateThis will make the necessary adjustments to your project’s configuration files and build tooling, but it won’t touch your source code.
Please read our migration guide for detailed instructions on updating your project.
Wireless Upload Reliability
Behind the scenes, we’ve rewritten the VEX serial protocol implementation (now called vex-cdc) that powers cargo-v5 from the ground up. This comes with improvements to memory usage and upload reliability, especially when working with wireless controller uploads.
We’re also now able to detect cases where the controller firmware has frozen or experienced a deadlock in its radio firmware and cancel the upload.
cargo v5 upload --releaseError: cargo_v5::radio_channel_stuck × Controller is stuck in radio channel 9. help: This is a bug in the controller's firmware. Please power cycle the controller to fix this.Brain Key/Value Access
Alright, story time. Last weekend, I attended a tournament and forgot to set the team number on our Brains before going through inspection. While our hardware was being inspected, I was scrambling to find a way to change this so we didn’t have to go to the back of the line. Unfortunately, cargo-v5 didn’t support doing this so I desperately loaded up the VEXcode webapp in my browser and was met with this screen.
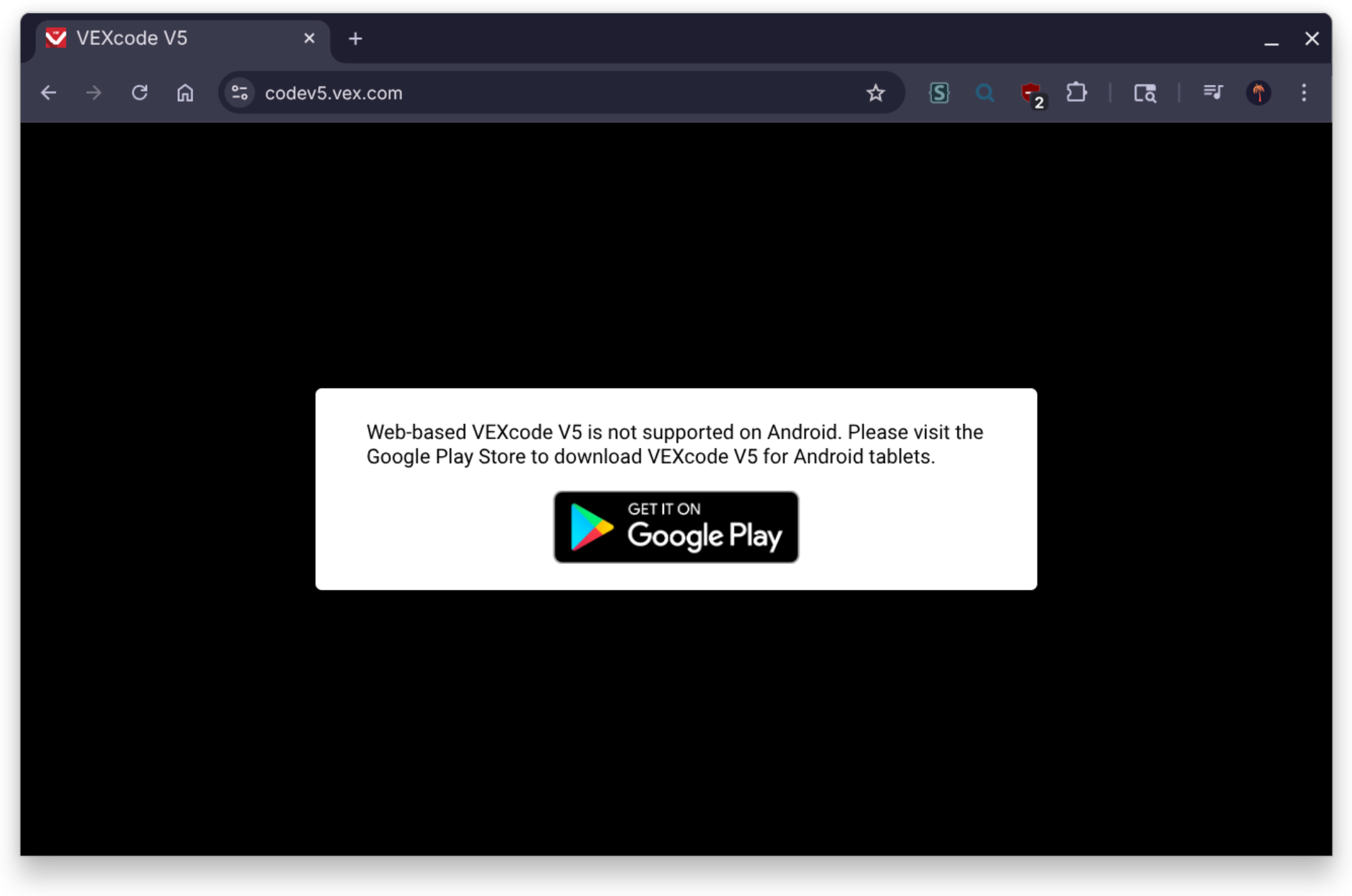
Great. VEX is blocking all linux user agents from loading VEXcode under the impression that they’re Android users! What’s shocking is that this page will load fine on chromeOS, so I have no idea how they’ve managed to mess this up. Anyways, I downloaded a user agent spoofer and lied to the site that I was loading it from Windows… still no luck.
In the end, I had to dig up a 9-month old copy of vex-v5-serial and write my own program over the serial protocol to set our Brains to the correct team number. This sucked, and I don’t want anyone else to go through that pain, so as of 0.12.0 cargo-v5 now supports setting the Brain’s system key/value configuration through the cargo v5 kv commands. If you want to set your team number or robot name, you can now just do this:
cargo v5 kv set teamnumber 643Acargo v5 kv set robotname meow
New Contributors
vexide is a community project maintained for free by open-source contributors. We’d like to thank the following new contributors to the project:
- GamingLiamStudios fixed several issues with our filesystem implementation.
- fibonacci61 wrote an initial implementation of our new async Task-local Storage system in vexide’s async runtime.
- slipperking fixed some bugs in vexide’s AI Vision API and helped with documentation.
- aadishv and the
venice-v5team provided important feedback and bug reports for vexide 0.8.0 throughout its development.
Thanks again for your contributions!
